➡ Une équipe internationale de chercheurs (Italie, Brésil, Grande-Bretagne, USA et Belgique), avec notamment Andreagiovanni Reina, Chargé de recherches FNRS ULB - Université libre de Bruxelles , vient de publier les résultats de ses travaux dans Nature Communications.
➡ Les scientifiques ont étudié comment un mouvement fiable peut émerger dans des agrégats d’individus très sujets aux erreurs.
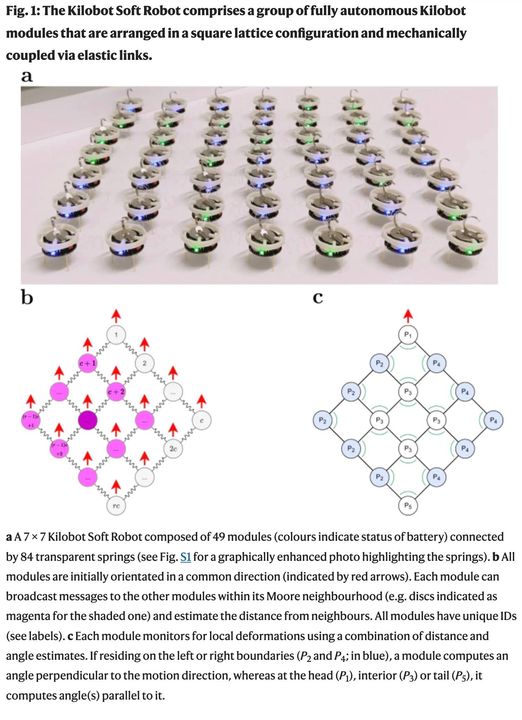
➡ Les individus – des modules robotiques – se déplacent stochastiquement à l’aide de moteurs vibrants. En les couplant via des liens élastiques, des agrégats à corps mou peuvent être créés.
➡ Les résultats démontrent que les couplages mécaniques peuvent jouer un rôle essentiel dans l’obtention d’un mouvement cohérent entre des individus ayant des capacités excessivement limitées et sujettes aux erreurs, et peuvent ouvrir la voie à des robots extensibles de faible puissance pour la surveillance et la manipulation à haute résolution.
➕ En savoir plus avec la publication dans Nature Communications...